
Hi Tom,
Hey all,
I've released v2016.09 and it's now live on git and FTP and ACD (along with PGP sig file).
To repeat some of the highlights from the rc releases:
- More DM work (MMC, of-platdata for size constrained instances, etc)
- Lots and lots of architecture / SoC / Platform updates: x86,
rockchip, sunxi, TI, NXP/FSL, Tegra, Zynq, uniphier
- mkimage cleanups
- More test.py updates, vboot now a testcase
- Secure boot work on both ARM and PowerPC.
- PSCI updates
- MAKEALL is gone, buildman is for use by all
- We now have xtensa support
- DT overlays
- More Kconfig migration
- Some NFS fixes
Note that in some cases you may see a message like: CACHE: Misaligned operation at range [xxxxxxxx,yyyyyyyy] and there's good and bad news here. What had been a debug print (and so off basically) is now a regular message. So there's no new problems, just problems that are now visible and we're working on fixing. Some of these were solved during the cycle but some of them still need some more discussion or just a decision being made (so, that's on me).
Another thing I'd like to call out, and ask for a little help with too is automated testing. The framework in test/py/test.py can be used on real hardware and Stephen Warren has been doing a good job having things run on Tegra boards. You can see his scripts here[1]. I've setup locally some of my boards (some TI, RPi3, A20-OLinuXino-Lime2) and I'm looking at adding more still, so long as I can update U-Boot in a way that does not involve the console. You can see my scripts here[2] and I'm cleaning things up and pushing them back up to Stephen. But there's always more to do and test. Is anyone else out there running this on real hardware, or would like to set this up? Has anyone out there gotten this hooked up with qemu?
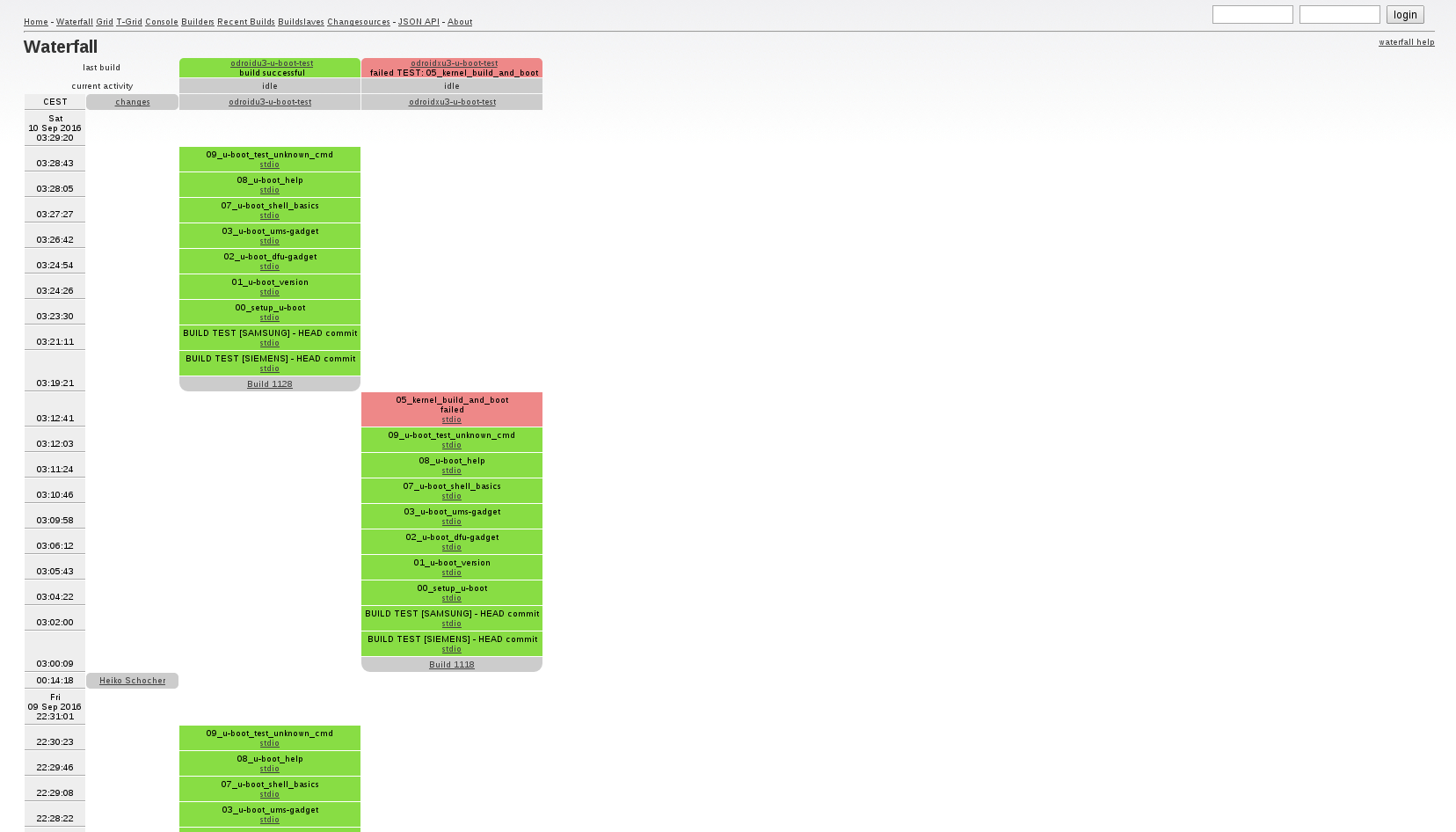
For testing I'm using real HW - Odroid U3 and Odroid XU3 boards
Basically, I'm using DFU [*] and Thor to upload binaries (kernel, rootfs, u-boot, mbr.img when needed).
The architecture is as follows: - Buildbot to display data - Some bash scripts with wrapped expect to control the device (Yes, it works stable). I'm also using u-boot's ./test/py/test.py - Simple FTDI serial dongle [2], control SW (python) can be found here [3] - Arduino relays - [4] - NO JENKINS - R.I.P
[*] - It is also possible to use DFU via ETH [1]
[1] - ./doc/README.dfutftp [2] - https://www.amazon.com/Gikfun-FT232RL-Adapter-Arduino-AE1186x2/dp/B01HXT8DZ4... [3] - https://github.com/lmajewski/HWT_io_ctl [4] - https://www.amazon.com/JBtek-Channel-Module-Arduino-Raspberry/dp/B00KTEN3TM/...
Cost effective and simple.
Moreover, the Buildbot controlled tests also perform build tests for Samsung and other manufacturers.
Two remote repositories are monitored (polled) - u-boot master and my u-boot-dfu {master|testing}
More than 1k runs for both boards without failure.
Supported tests: - Build u-boot and flash it - Check flashed u-boot version - u-boot_dfu-gadget (out ./test/py/ test) - u-boot_ums-gadget (out ./test/py/ test) - u-boot_shell_basics (out ./test/py/ test) - u-boot_help (out ./test/py/ test) - u-boot_test_unknown_cmd (out ./test/py/ test) - kernel_build_and_boot - u-boot_sleep (out ./test/py/ test)
Screenshot attached.
As always, I know I'm missing pointing out a few things that I should point out and would encourage folks to chime in if there's anything they would like to highlight.
Thanks again everyone!
{kind=link}